Made in USA
The Embedded Solutions Experts
ENET-IO
ENET-IO [Ethernet IO] with DeGUI for Industrial Embedded IO - Switch, Bridge, Router, Conversion, local control - High bandwidth Linux based local processing



ENET-IO Description
- DeGUI included with purchase - control operation with Browser based GUI or direct computer control
- Multiple Modes supported including Bridge[Ethernet conversion to IO], Switch/Router [create network: receive on chassis N port X and transmit on chassis M port Y], Multicast, Snoop, file insertion included
- Convert between port types - implicit in Switch operation
- Multiple configurations to support standalone and multiple chassis set-ups with local and remote connectivity
- Install 1-3 Standard PMC based IO modules + CPU in current solutions
- DMA operation
- Power supplies built into motherboard, single reference rail only, Reverse Power Protection provided
- Bezel and/or rear IO
- 1 year warranty standard. Extended warranty available.
- Extended [Industrial] Temperature standard.
- ROHS and Standard processing available
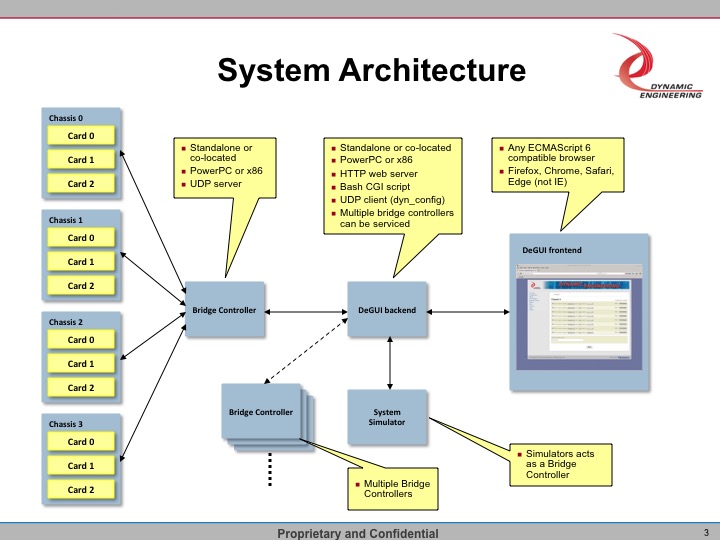
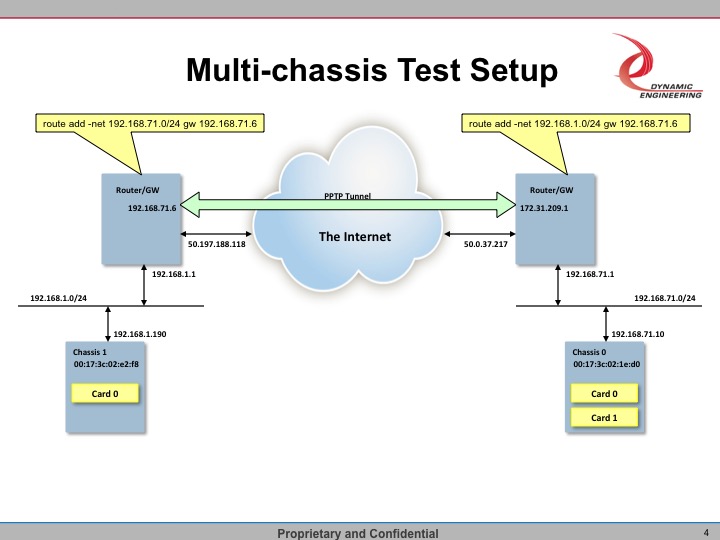
ENET-IO is a unique product with features allowing operation in many configurations: stand-alone, remote with Ethernet control, multiple chassis cross-connected with store and forward, local and remote bridging and more.
For example the first version delivered is used by our client to cross connect HDLC based equipment in two different states with the ENET-IO used to convert from HDLC to ethernet, and the internet used to cross connect the devices with the efffect of having the HDLC communicating as if co-located.
We have added man years of effort in the areas of adding an advanced GUI, allowing for direct control, adding bridging functions: load a file with the GUI to a particular node or multicast, capture a file, snoop etc.
ENET-IO currently is built with the PMC-MC series of chassis and motherboards. The -X2 version has two PMC positions and the -X4 has 4 positions. Both motherboard/chassis systems support operation with local power supplies, reverse power protection, PCI connections and termination, Interrupt routing, bus arbitration, clock generation, and in the case of the X4 a secondary power connector suitable for opearating secondary attached equipment. A 2020 based CPU is used in position 0 leaving room for 1-3 PMC´s.
The PMC´s can support whatever IO requirement you have. For example we can install PMC-BiSerial-VI-UART with 8 channels of differential UART and PMC SpaceWire allowing independent and cross connected operation of the IO. The command interface whether GUI or direct can configure the CPU to cross connect the channels, capture data, insert data into the stream, forward to another port etc. With the X4 model up to 12 SpaceWire ports can be provided along with the local packet flow control. Please refer to the Models tab to see the standard models and know that we can mix and match IO. Most Dynamic Engineering Linux drivers are designed to allow for integration into this system.
ENET-IO GUI Description
ENET-IO Features
DynEngGui Programmability
IO
With PMC technology IO standards are plentiful with Single Ended [i.e. TTL, RS232] and differential [i.e. LVDS, RS485, ECL], transformer coupled, Analog etc. available on this form factor.
Processing
Soon supported with a T1042 based CPU running Linux. The CPU and backplane support DMA.
Chassis
ENET-IO is offered utilizing the PMC-MC-XN Two and Four position chassis. Both are compact industrial grade solutions with built in power supplies, cooling, Reverse power protection, options to support embedding the motherboard into a third party system.
Power
10-40V converted to 12, -12, 5, 3.3V with local DC:DC power supplies for efficient power conversion. Supplied with 24V power adapter - universal with multiple socket adapters.
LEDs
On rear indicating Power Supplies are in regulation.
Interface Types
Standard: SpaceWire, UART, HDLC/SDLC, HOTLink Customized: with PMC-BiSerial-VI, PMC-Parallel-TTL etc. Please send us a timing diagram, and we can program one for you. Most interfaces can be adapted from our large library of designs including the updated VHDL, and Linux Driver, reference manuals etc.
Common requested and implemented interface types include: Manchester, Miller, SDLC, UART, Serial, Parallel, GPIO, COS, Custom, LADEE, NMS, Camera, Ternary, Low Speed, High Speed, Telemetry, Master & Target interactive IO, Adaptive. Mix and Match. Third party PMC devices can be accomodated by writing a compatible driver. Contact Dynamic Engineering to discuss your requirement.
Common requested and implemented interface types include: Manchester, Miller, SDLC, UART, Serial, Parallel, GPIO, COS, Custom, LADEE, NMS, Camera, Ternary, Low Speed, High Speed, Telemetry, Master & Target interactive IO, Adaptive. Mix and Match. Third party PMC devices can be accomodated by writing a compatible driver. Contact Dynamic Engineering to discuss your requirement.
DynEngGui Safety
- Validation of HTTP header fields.
ENET-IO Benefits
IO Types
ENET-IO has off-the-shelf options, and the ability to be configured for your requirements. Pick any Dynamic Engineering PMC and we can port the Linux driver to the ENET-IO system, and add as a component of your system. Pick a third party PMC and we can write a new driver and then integrate into the system [NRE required]
Small Systems
ENET-IO can be configured to have the Bridge, Switch and Router functions all handled within the users PC and PMC-MC system. A great choice for system simulation, integration and test needs etc. For example, if you are developing a SpaceWire application and need to move data across multiple nodes with ease, pick one of the ENET-SpaceWire options, use the GUI and send files across to the target hardware and capture the returned data. A simple way to challenge your HW is to make a loop using the ports in the switch and the ports on your device with the last one directed back to the first. Then inject a file into the path and watch the data transfer statistics as the file is received and resent in and out of the ports.
Larger Systems
Utilize multiple ENET-IO chassis with the ethernet link tied to a switch. Use a master computer to configure the chassis [static or dynamic] to perform switch and router functions. The chassis can be located anywhere the internet can reach. The IO can be uniform or of different types. Subsytems can be configured or one large one defined.
Ease of Use
ENET-IO is designed to be easy to use. With GUI or direct SW control, stored configurations, consistent operation independent of IO installed. [Some features may not be available with third party PMC devices].
Availability
Systems are built to order based on the highly configurable options. Default types are stocked, options may add some lead time.
PMC Specification Compatibility
PMC-MC-X2 and PMC-MC-X4 are compliant per the VITA PMC/CMC specifications.
Part Number: ENET-IO
Ordering Options
- ENET-SpaceWire-N N= 3,6,9 SpaceWire Links supported. Based on 1-3 PMC-SpaceWire-BK
- ENET-UART-N-(LVDS) N= 8,16,24 UART ports supported. RS485 is default, LVDS is option. Based on 1-3 PMC-BiSerial-VI-UART
- ENET-USR Contact Dynamic Engineering for User Defined models, mixed IO types etc. Common Options:
- -ROHS Use ROHS processing. Standard processing is ""leaded"
- -CC Option to add Conformal Coating
- -X4 X4 refers to using the larger chassis when only 1 IO PMC is installed. Useful when adding more IO later.
ENET-IO Drivers
Software Support for ENET-IO-XXX includes: Linux compliant drivers
Please see the Driver manuals for the specifics of each type.
Drivers and Reference SW are developed for each type / version of ENET-IO implemented. When custom versions are ordered the NRE will include providing Windows, Linux, and or VxWorks packages. For off-the-shelf models, select on the manuals tab, the Windows® and Linux SW shown is included with your purchase of the HW. A small one-time charge is required for the VxWorks versions. Unsupported SW versions may have an NRE requirement.
Integration support is available. Please contact Dynamic Engineering for this option or download the Technical Support Description from the Company button.
Please see the Driver manuals for the specifics of each type.
Drivers and Reference SW are developed for each type / version of ENET-IO implemented. When custom versions are ordered the NRE will include providing Windows, Linux, and or VxWorks packages. For off-the-shelf models, select on the manuals tab, the Windows® and Linux SW shown is included with your purchase of the HW. A small one-time charge is required for the VxWorks versions. Unsupported SW versions may have an NRE requirement.
Integration support is available. Please contact Dynamic Engineering for this option or download the Technical Support Description from the Company button.
ENET-IO Models
ENET-IO-UART

8 UART I/O ports each consisting of RS-485 transmit and receive data. [LVDS is an ordering option] The UART interface uses a 16x clock to detect received data bits. Received data is filtered with the port reference clock to remove line glitches. The interface can operate at up to 2 Mbits/second using a 32 MHz clock. Reference clock for each port is selectable between the 32 MHz reference and a user programmed PLL frequency. Each UART port has 255 x 32 FIFO for transmit and another 255x32 for receive in addition to Packet Definition FIFO´s. DMA support on all channels. 5 modes can be selected per fully independent node: Standard UART (unpacked), Packed, Packetized, Alternate Packetized, and Test. Options for Bezel and Rear IO.
UnPacked mode 8 bit data is assumed mimicking standard UART operation
Packed mode 32 bit data is assumed allowing 4 characters to be read/written at a time.
Packetized mode allows for non-LW data lengths, and retains most of the efficiency of LW packing. Odd lengths [non LW boundaries] are loaded with the complete LW´s first then the remainder. The Packet length FIFO is programmed with the length to send. The Packet lengths can be loaded to transmit with minimal HW delay between Packets or with a programmed delay.
Alternate Packetized mode uses 3 bytes per LW and has the packet descriptor information built into the 4th byte.
Test mode SW controls the output pattern to allow for programmed errors on certain characters sent.
Programmable timers are available to control the time between packets sent and as a master timer to start new bursts of packets. In addition the Alternate Packet mode supports automatic tristate control and automatic transmit enable/disable to support the packet burst timing. Please see the HW manual for more information.
Download the PMC BiSerial VI UART Hardware manual.
Download the PMC BiSerial VI UART Windows Driver manual.
8 UART I/O ports each consisting of RS-485 transmit and receive data. [LVDS is an ordering option] The UART interface uses a 16x clock to detect received data bits. Received data is filtered with the port reference clock to remove line glitches. The interface can operate at up to 2 Mbits/second using a 32 MHz clock. Reference clock for each port is selectable between the 32 MHz reference and a user programmed PLL frequency. Each UART port has 255 x 32 FIFO for transmit and another 255x32 for receive in addition to Packet Definition FIFO´s. DMA support on all channels. 5 modes can be selected per fully independent node: Standard UART (unpacked), Packed, Packetized, Alternate Packetized, and Test. Options for Bezel and Rear IO.
Programmable timers are available to control the time between packets sent and as a master timer to start new bursts of packets. In addition the Alternate Packet mode supports automatic tristate control and automatic transmit enable/disable to support the packet burst timing. Please see the HW manual for more information.
Download the PMC BiSerial VI UART Hardware manual.
Download the PMC BiSerial VI UART Windows Driver manual.